Xiaocun Liao (廖晓村)
Xiaocun Liao (廖晓村)
Associate Professor, PhD
 Institute of
Automation, Chinese Academy of Sciences
Institute of
Automation, Chinese Academy of Sciences liaoxiaocun2019@ia.ac.cn | xiaocun.liao@ia.ac.cn
liaoxiaocun2019@ia.ac.cn | xiaocun.liao@ia.ac.cn
Never say never ! 👆

Hello
Institute of
Automation, Chinese Academy of Sciences liaoxiaocun2019@ia.ac.cn | xiaocun.liao@ia.ac.cn
Never say never ! 👆
Representative Research Overview✨ ✨ ✨

The current ongoing research covers the following aspects, and the related results have been published in international journals including Soft Robotics, IEEE/ASME Transactions on Mechatronics, IEEE Journal of Oceanic Engineering, IEEE Robotics and Automation Letters, etc.
Variable Stiffness Robotic Fish✨ ✨ ✨

A Fast Online Elastic-Spine-Based Stiffness Adjusting Mechanism for Fishlike Swimming
 Publication: Soft Robotics (SCI, Q1, IF: 7.9)
Publication: Soft Robotics (SCI, Q1, IF: 7.9)
 Abstract:
Abstract:
Fish tunes fishtail stiffness by coordinating its tendons, muscles, and other tissues to improve swimming performance for adapting to the survival needs in different scenarios. For example, fish can dynamically adjust fishtail stiffness to adapt to sudden water flow for maintaining high swimming performance. The stiffness adjustment allows fish to display capabilities during preying and escape. For robotic fish, achieving a fast and online fishlike stiffness adjustment over a large-scale range is of great significance for performance improvement. To this end, a fast online variable stiffness mechanism is proposed. The fast and online stiffness adjustment over a large-scale range is achieved by adjusting the effective length of the spring-steel-based elastic spine. In order to explore the effect of fishtail stiffness adjustment on swimming performance, the fishtail stiffness model and the response time of stiffness adjustment are analyzed, and a dynamic model based on Kane method is proposed. Combining the Morrison equation, Lift-drag model and Computational Fluid Dynamics, the hydrodynamic force is analyzed. The ability to adjust stiffness fleetly over a large-scale range for the designed variable stiffness robotic fish and the accuracy of the proposed model are verified by the analyses of swimming performances, such as swimming speed and thrust. The fishtail stiffness can be switched in the maximum adjustable range within 0.26 s, and a maximum swimming speed of 0.43 m/s (0.81 BL/s) is obtained.
 Role: First author
Role: First author
 DOI: 10.1089/soro.2023.0204
DOI: 10.1089/soro.2023.0204
 Citation: Xiaocun Liao, Chao Zhou, Long Cheng, Jian Wang, Junfeng Fan, and Zhuoliang Zhang. "A
Fast Online Elastic-Spine-Based Stiffness Adjusting Mechanism for Fishlike Swimming." Soft Robotics
11, no. 6 (2024): 935–945.
Citation: Xiaocun Liao, Chao Zhou, Long Cheng, Jian Wang, Junfeng Fan, and Zhuoliang Zhang. "A
Fast Online Elastic-Spine-Based Stiffness Adjusting Mechanism for Fishlike Swimming." Soft Robotics
11, no. 6 (2024): 935–945.


Combination of C-turn and Online Variable Stiffness Enables Sharp Turning Maneuvers for Robotic Fish
Publication: IEEE Journal of Oceanic Engineering (SCI, Q1, IF:
5.3)
Abstract:
The ability of fish to turn sharply is one of the key skills for surviving in water, allowing them to more effectively tackle multiple survival challenges, including evading predators and pursuing prey, etc. Imitating the sharp turning maneuvers of fish to improve the maneuverability of robotic fish is extremely challenging, but significant to reinforce its practical application capability. This paper proposes a motion control strategy for sharp turning maneuvers of robotic fish, which combines the fish-like C-turn behavior and the variable stiffness mechanism. Based on the developed dynamic model, with the optimization goal of minimizing turning time, the parameters of C-turn motion and fishtail stiffness are optimized to improve the turning efficiency of robotic fish. Simulation and experimental results demonstrate that the proposed turning strategy for robotic fish performs well in shortening turning time and improving turning efficiency. Compared with the strategies for the case of no C-turn and the fixed stiffness, the case of no C-turn and the adjustable stiffness, and the case of C-turn and the fixed stiffness, the turning time for the proposed turning strategy decreases by 53.2%, 41.1%, and 27.9%, respectively.
Role: First author
DOI: 10.1109/JOE.2025.3586410
Citation: Xiaocun Liao, Chao Zhou, Zhuoliang Zhang, Liangwei Deng, Zhaoran Yin. "Combination of
C-turn and Online Variable Stiffness Enables Sharp Turning Maneuvers for Robotic Fish." IEEE Journal of
Oceanic Engineering, Early Access, (2025).

Wire-driven Robotic Fish✨ ✨ ✨
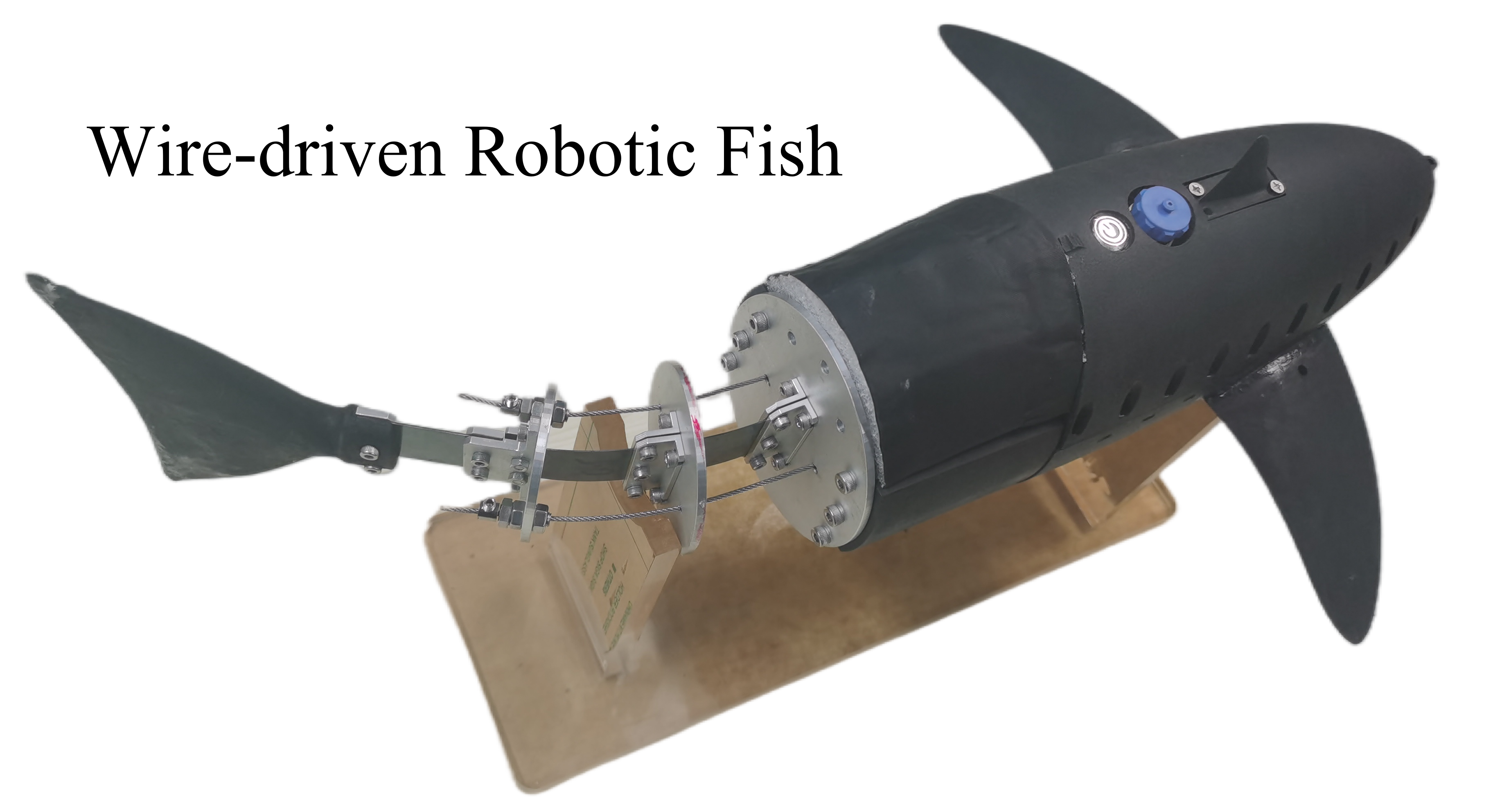
A Wire-Driven Dual Elastic Fishtail With Energy Storing and Passive Flexibility
Publication: IEEE/ASME Transactions on Mechatronics (SCI, Q1, IF: 6.4)
Abstract:
The extraordinary swimming performance of fish benefits from the complex motion of the continuum fishtail, which is difficult for robotic fish to replicate. The common approach is adopting a large number of discrete joints, which introduces some challenges, e.g., the redundant degrees of freedom, the friction loss of adjacent joints, etc. Hence, this article presents a robotic fish equipped with a wire-driven dual elastic fishtail with energy storing and passive flexibility. This fishtail consists of an active elastic fishtail and a passive flexible joint, both of which periodically store energy due to the elastic deformation, benefiting to improving the motor's output stability and swimming performance, respectively. Especially, fishtail automatically adapts to complicated fluid by passive flexibility. Differing from the existing robotic fish, the wire-driven mode is combined with an efficient transmission mechanism to improve transmission efficiency. Using the developed dynamic model, the fishtail's energy storing is analyzed, and fishtail's stiffness is optimized to obtain the expected swing and high swimming performance. Extensive simulations and experiments have been conducted to validate the proposed model, and our robotic fish is capable of a maximum speed of 0.92 m/s, i.e., 1.87 BL/s.
Role: First author
DOI: 10.1109/TMECH.2023.3318219
Citation: Xiaocun Liao, Chao Zhou, Jian Wang, and Min Tan. "A Wire-Driven Dual Elastic Fishtail
With Energy Storing and Passive Flexibility." IEEE/ASME Transactions on Mechatronics 29, no. 3
(2024): 1914 - 1925.

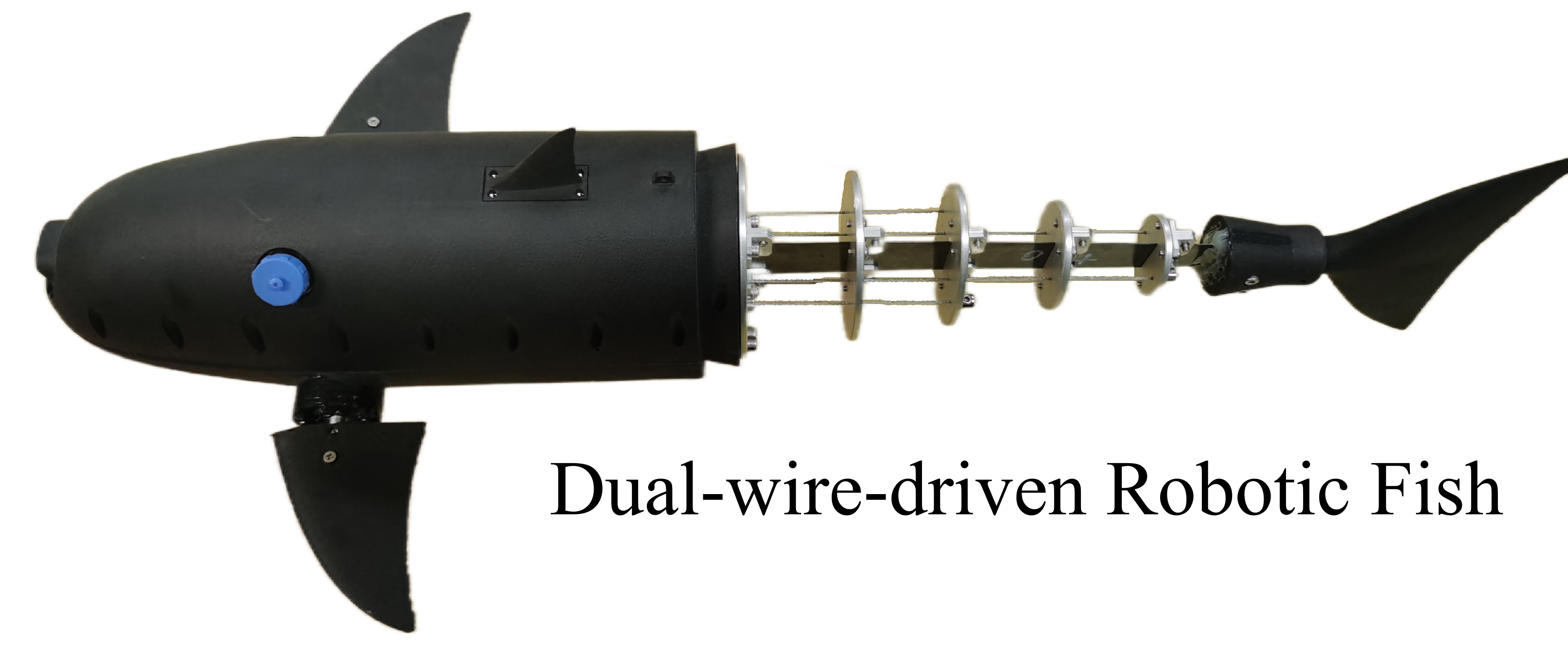
Realize the Design and Motion Modeling of A Dual-wire Driven Elastic Robotic Fish
Publication: IEEE Robotics and Automation Letters (SCI, Q2, IF: 4.321), Journal of Intelligent & Robotic Systems (SCI, Q3, IF: 3.129), IEEE International Conference on Mechatronics and Automation (EI);
Abstract:
In order to emulate the complex and continuous tail fluctuations of fish in nature, a dual-wires driven flexible fishtail-like propulsion mechanism is designed. It adopts dual wires to emulate fish tendons for achieving fishtail-like swing, and utilizes spring steel to emulate fish spine, which not only realizes the fish-like mechanism of energy storage and release, but also avoids the friction loss of joint existing in the discrete joint-based bionic spine. Further, the mechanism coupling and kinematic model of the fishtail are analyzed, and a data-driven motion decoupling control algorithm and fishlike fluctuation control algorithm are proposed to realize the fishtail-like fluctuation. In order to evaluate swimming performance, a speed estimation model suitable for steady state analysis and a dynamic model suitable for dynamic analysis are proposed. The accuracies of the two models are verified by the comparison between simulation and experimental speeds at different frequencies and amplitudes. Finally, the new advantage of combining wire-driven mechanism with elastic component in robotic fish is explored. The results show that compared with multi-joints robotic fish, the robotic fish based on dual-wires driven flexible fishtail-like propulsion mechanism can achieve smoother output power of servomotor, smaller load of servomotor, higher swing frequency, faster swimming speed, and lower cost of transport (COT).
Role: First author
DOI:
10.1109/LRA.2022.3197911,
10.1007/s10846-022-01797-9,
10.1109/ICMA52036.2021.9512706;
Citation:

Energy-storing Analysis and Fishtail Stiffness Optimization for a Wire-driven Elastic Robotic Fish
Publication:
Under Review
Abstract:
The robotic fish with high propulsion efficiency and good maneuverability achieves underwater fishlike propulsion by commonly adopting the motor to drive the fishtail, causing the significant fluctuations of the motor power due to the uneven swing speed of the fishtail in one swing cycle. Hence, we propose a wire-driven robotic fish with a controlled flexible unit that is a spring-steel-based fishlike tail. This unit can produce elastic deformation to store energy under the action of the wire driving and motor for responding the fluctuations of the motor power. Further, we analyze the effects of the energy-storing of the controlled flexible unit on the smoothness of motor power. Based on the developed Lagrangian dynamic model and cantilever beam model, the power-variance-based nonlinear optimization model for the stiffness of the controlled flexible unit is established to respond to the sharp fluctuations of motor power during each fishtail swing cycle. Results validate that the energy-storing of the controlled flexible unit plays a vital role in improving the power fluctuations and maximum frequency of the motor by adjusting its stiffness reasonably, which is beneficial to achieve high propulsion and high speed for robotic fish. Compared with the controlled rigid unit that is incapable of storing energy, the energy-storing of the controlled flexible unit is beneficial to increase the maximum frequency of the motor and the average thrust of the fishtail by 0.41 Hz, and 0.06 N, respectively.
Role: First author
DOI: 10.48550/arXiv.2406.03875
Citation: Xiaocun Liao, Chao Zhou, Junfeng Fan, Zhuoliang Zhang, Zhaoran Yin, and Liangwei Deng.
"Energy-storing analysis and fishtail stiffness optimization for a wire-driven elastic robotic fish."
arXiv preprint arXiv:2406.03875 (2024).

Hydrodynamic Analysis ✨ ✨ ✨
Non-Parametric Kinematic Optimization of Flapping Foil Propulsion Using a Discrete Adjoint Method
Publication: Biomimetics (SCI, Q1, IF: 3.9)
Abstract:
Optimizing flapping-foil kinematics for underwater propulsion is challenging due to strong temporal coupling and nonlinear fluid–structure interactions. Most existing approaches rely on parameterized motion profiles, which restrict the accessible design space. A non-parametric kinematic optimization framework based on the discrete adjoint method is developed, enabling direct optimization of time-resolved motions without predefined functional forms. A Morison-based low-order hydrodynamic model, calibrated against Computational Fluid Dynamics (CFD), is employed for efficient evaluation within a validated regime. Results show that optimized motions substantially enhance propulsion performance over conventional sinusoidal motions, yielding non-sinusoidal, high-efficiency kinematics. In thrust-maximization cases, the optimized kinematics achieve a 50.29% increase in mean thrust by redistributing heave and pitch amplitudes and timing. Under balanced thrust–power conditions, the optimized motions consistently outperform sinusoidal counterparts. In power-minimization cases, a “generator-like” regime emerges, indicating a reversal of net energy transfer enabled by the non-parametric formulation. These results demonstrate that non-parametric optimization provides enhanced design flexibility and improved propulsion performance, offering a practical framework for biomimetic underwater propulsion design.
Role: Corresponding author
DOI: 10.3390/biomimetics11060393
Citation: Zhaoran Yin, Chao Zhou, Xiaofei Wang, Xiaocun Liao, and Jian Wang. "Non-Parametric Kinematic Optimization of Flapping Foil Propulsion
Using a Discrete Adjoint Method." Biomimetics 11, no. 6
(2026): 393.

Gripper ✨ ✨ ✨
Cylindrical-Layer-Jamming Enables Stiffness Adjustment of Two-fingered Gripper for Versatile Grasping
Publication:
Under Review
Abstract:
To accommodate the grasping of diverse objects, grippers should enable flexible transitions between compliant adaptive enveloping and firm clamping through large-range stiffness adjustment. However, existing variable-stiffness methods based on smart materials such as shape memory materials exhibit limited response speed, high energy consumption, and susceptibility to environmental factors like temperature. Fluid-driven variable-stiffness grippers feature response hysteresis, stringent sealing requirements, and difficulties in miniaturization, while most variable-stiffness grippers based on conventional mechanisms tend to have complex structural designs. To this end, this paper proposes a novel variable-stiffness two-fingered gripper based on a cylindrical-layer-jamming mechanism. By actively regulating the contact pressure between the adjacent cylindrical-layer-jamming blocks of finger phalanx, the interfacial friction is modulated, thereby enabling the adjustment of finger bending stiffness. A theoretical model is established to analyze the characteristics, including critical force and frictional moment, for variable-stiffness fingers. Simulations and experiments demonstrate that the proposed variable-stiffness gripper achieves a maximum grasping force of 7.590 N. Compared with the fixed-stiffness configuration, the variable-stiffness capability endows gripper with enhanced grasping stability. Moreover, the designed gripper is capable of performing both vertical and horizontal grasping of objects with diverse shapes, sizes, materials, and weights, and accomplishing pick-and-place operations for objects in different orientations.
Role: First author
